from phasic import (
Graph, with_ipv, GaussPrior, MoMResult, ProbMatchResult,
Adam, ExpStepSize, clear_caches, dense_to_sparse,
StateIndexer, Property,
) # ALWAYS import phasic first to set jax backend correctly
import numpy as np
import jax.numpy as jnp
import matplotlib.pyplot as plt
import seaborn as sns
%config InlineBackend.figure_format = 'svg'
np.random.seed(42)
try:
from vscodenb import set_vscode_theme
set_vscode_theme()
except ImportError:
pass
sns.set_palette('tab10')Method of Moments
Data-informed priors via moment matching
A common challenge in Bayesian inference with SVGD is choosing sensible prior distributions. A vague prior may lead to slow convergence or poor exploration of the posterior, while an overly tight prior can bias the result. The method_of_moments method provides a principled way to construct data-informed priors by finding parameter estimates that match the model’s theoretical moments to the empirical moments of the observed data.
The method solves the nonlinear least-squares problem:
\hat{\theta}_{\text{MoM}} = \arg\min_{\theta > 0} \left\| \mathbf{m}(\theta) - \hat{\mathbf{m}} \right\|^2
where \mathbf{m}(\theta) are the model moments and \hat{\mathbf{m}} are the sample moments computed from the data. The standard error of the estimator is obtained via the delta method:
\text{Cov}(\hat\theta) \;=\; \left(\frac{\partial \mathbf{m}}{\partial \theta}\right)^{-1} \text{Cov}(\hat{\mathbf{m}}) \left(\frac{\partial \mathbf{m}}{\partial \theta}\right)^{-T}
where \text{Cov}(\hat{\mathbf{m}}) is estimated from the data. The point estimate and standard error are then used to construct Gaussian priors centred on the MoM estimate.
This is fast (seconds, not minutes) and gives SVGD a much better starting point than a generic prior.
Single-parameter model
We start with the simplest case: a single-parameter exponential model. The coalescent rate \theta governs how quickly lineages coalesce. For an exponential distribution, the method of moments has an analytical solution: \hat{\theta} = 1 / \bar{x}.
nr_samples = 4
@with_ipv([nr_samples]+[0]*(nr_samples-1))
def coalescent_1param(state):
transitions = []
for i in range(state.size):
for j in range(i, state.size):
same = int(i == j)
if same and state[i] < 2:
continue
if not same and (state[i] < 1 or state[j] < 1):
continue
new = state.copy()
new[i] -= 1
new[j] -= 1
new[i+j+1] += 1
transitions.append([new, [state[i]*(state[j]-same)/(1+same)]])
return transitions
graph = Graph(coalescent_1param)
graph.plot()
Sample observed data from the model with a known true parameter value:
true_theta = [7]
graph.update_weights(true_theta)
observed_data = graph.sample(1000)Run method of moments to find the parameter estimate:
mom = graph.method_of_moments(observed_data)The result is a MoMResult dataclass containing the estimate, standard errors, and ready-to-use priors:
print(f"True theta: {true_theta}")
print(f"MoM estimate: {mom.theta}")
print(f"Std error: {mom.std}")
print(f"Converged: {mom.success}")
print(f"Residual: {mom.residual:.2e}")True theta: [7]
MoM estimate: [7.2751936]
Std error: [0.15985594]
Converged: True
Residual: 1.08e+00The MoMResult also reports how well the model moments match the sample moments:
print(f"Sample moments: {mom.sample_moments}")
print(f"Model moments: {mom.model_moments}")Sample moments: [[0.20624705 0.06304546]]
Model moments: [0.20618008 0.06402775]Multi-parameter model
Method of moments is especially useful for multi-parameter models where choosing good priors by hand is difficult. Here we use a two-population island model with coalescent rate \theta_0 and migration rate \theta_1.
from phasic import StateIndexer, Property
nr_samples = 2
indexer = StateIndexer(
descendants=[
Property('pop1', min_value=0, max_value=nr_samples),
Property('pop2', min_value=0, max_value=nr_samples),
Property('in_pop', min_value=1, max_value=2),
])
initial = [0] * indexer.state_length
initial[indexer.descendants.props_to_index(pop1=1, pop2=0, in_pop=1)] = nr_samples
@with_ipv(initial)
def coalescent_islands(state):
transitions = []
if state[indexer.descendants.indices()].sum() <= 1:
return transitions
for i in range(indexer.descendants.state_length):
if state[i] == 0: continue
props_i = indexer.descendants.index_to_props(i)
for j in range(i, indexer.descendants.state_length):
if state[j] == 0: continue
props_j = indexer.descendants.index_to_props(j)
if props_j.in_pop != props_i.in_pop:
continue
same = int(i == j)
if same and state[i] < 2:
continue
if not same and (state[i] < 1 or state[j] < 1):
continue
child = state.copy()
child[i] -= 1
child[j] -= 1
des_pop1 = props_i.pop1 + props_j.pop1
des_pop2 = props_i.pop2 + props_j.pop2
if des_pop1 <= nr_samples and des_pop2 <= nr_samples:
k = indexer.descendants.props_to_index(
pop1=des_pop1, pop2=des_pop2, in_pop=props_i.in_pop)
child[k] += 1
transitions.append([child, [state[i]*(state[j]-same)/(1+same), 0]])
if state[i] > 0:
child = state.copy()
other_pop = 2 if props_i.in_pop == 1 else 1
child[i] -= 1
k = indexer.descendants.props_to_index(
pop1=props_i.pop1, pop2=props_i.pop2, in_pop=other_pop)
child[k] += 1
transitions.append([child, [0, state[i]]])
return transitions
graph = Graph(coalescent_islands)
graph.plot()
true_theta = [0.7, 0.9]
graph.update_weights(true_theta)
observed_data = graph.sample(1000)Run method of moments on the two-parameter model:
mom = graph.method_of_moments(observed_data)print(f"True theta: {true_theta}")
print(f"MoM estimate: {mom.theta}")
print(f"Std error: {mom.std}")
print(f"Converged: {mom.success}")True theta: [0.7, 0.9]
MoM estimate: [0.70679884 0.76016923]
Std error: [0.02482546 0.20611669]
Converged: Truefig, axes = plt.subplots(1, len(mom.prior), figsize=(7,3))
for i, prior in enumerate(mom.prior):
prior.plot(return_ax=True, ax=axes[i])
plt.tight_layout() ;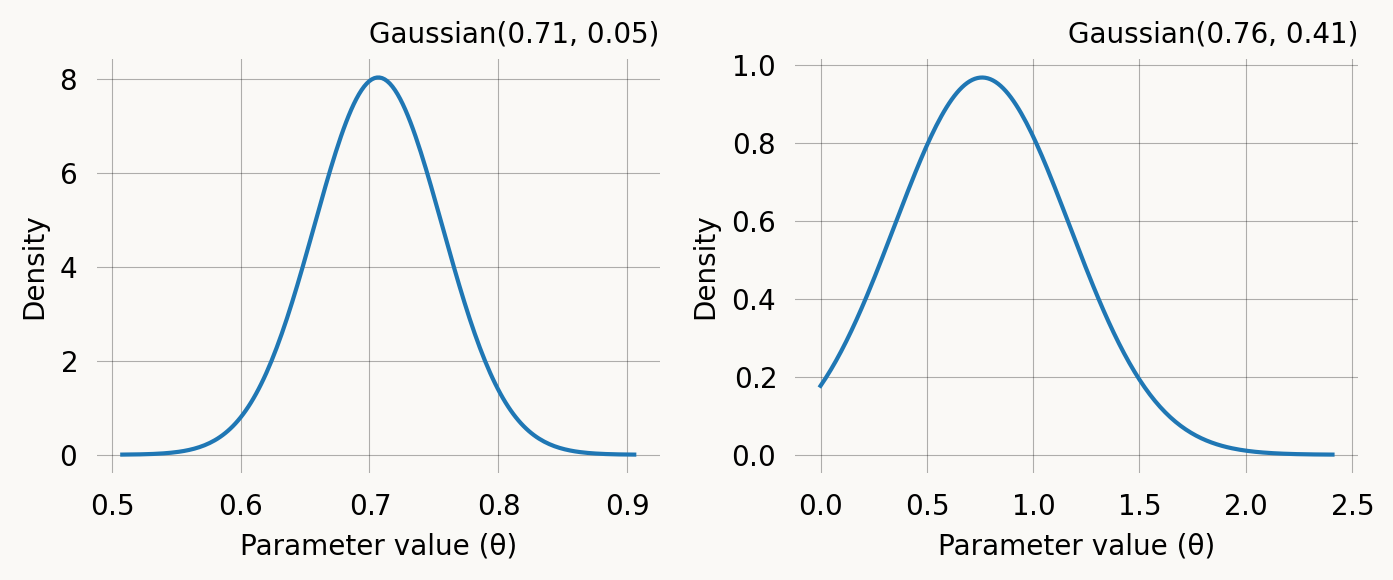
Use the MoM priors for SVGD inference:
svgd = graph.svgd(
observed_data,
prior=mom.prior,
# optimizer=Adam(0.25),
learning_rate=ExpStepSize(first_step=0.05, last_step=0.005, tau=20.0),
)svgd.summary()Parameter Fixed MAP Mean SD HPD 95% lo HPD 95% hi
0 No 0.7076 0.6903 0.0639 0.6156 0.7562
1 No 0.7448 0.6568 0.1984 0.0675 0.7451
Particles: 40, Iterations: 100svgd.plot_convergence()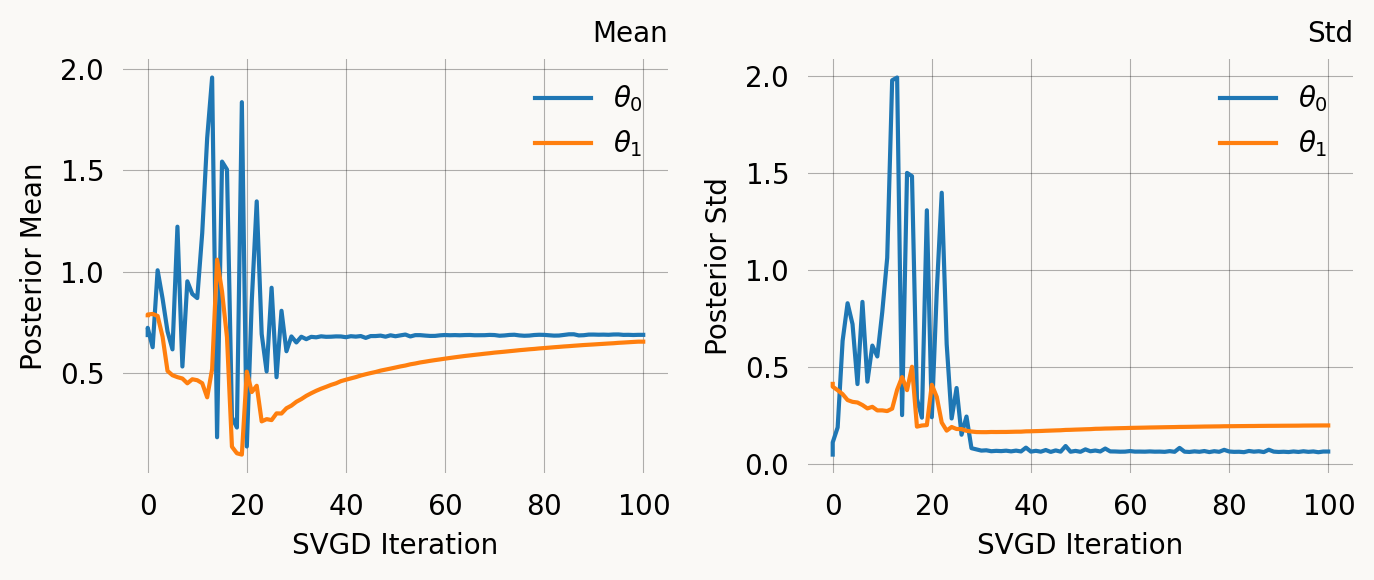
svgd.plot_pairwise(true_theta=true_theta)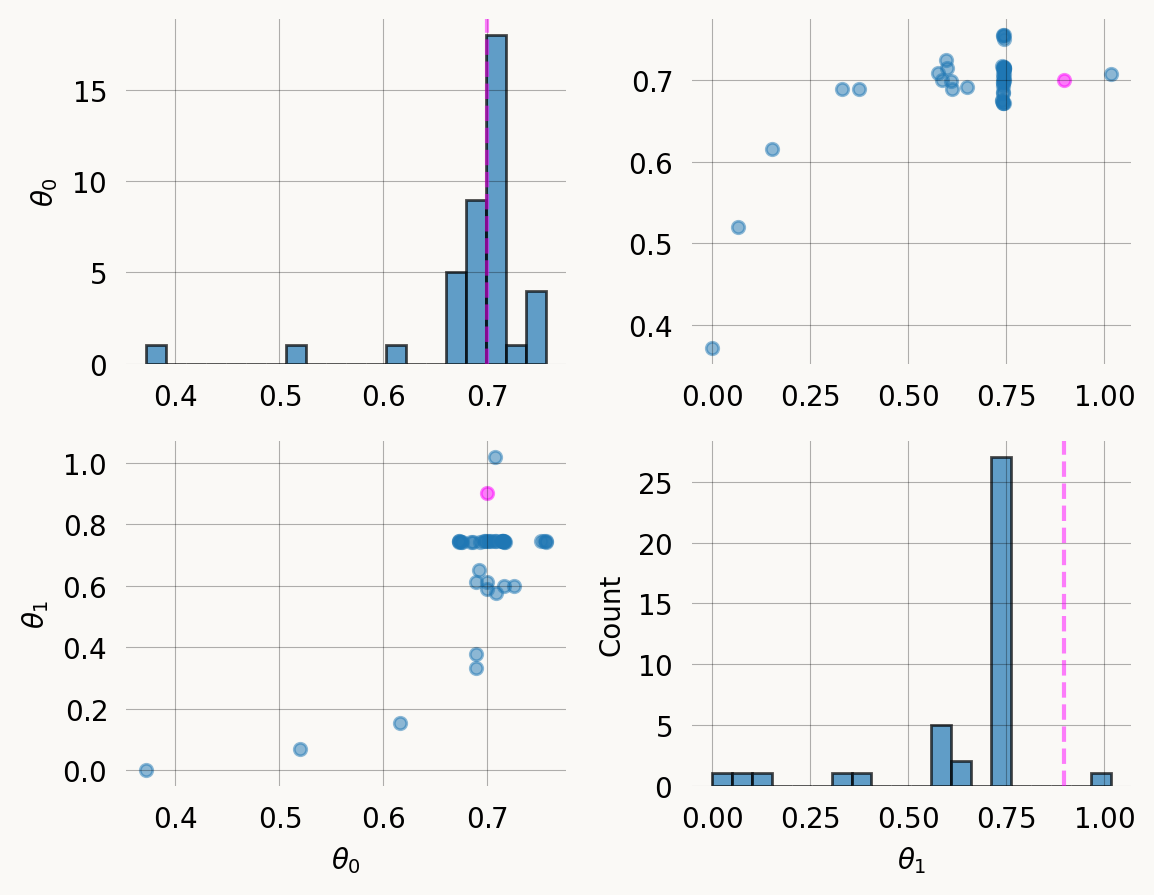
Multi-feature observations with rewards
For models where observations are reward-transformed (e.g. branch lengths contributing to different mutation categories in population genetics), method of moments can match moments per feature. Each feature has its own reward vector, and the combined system of equations constrains the parameters.
graph_1p = Graph(coalescent_1param)
true_theta_1p = [7]
graph_1p.update_weights(true_theta_1p)
# Create reward vectors — each row is a feature's reward across all vertices
states = graph_1p.states().T
rewards = states[:-1] # one row per feature (e.g. singleton, doubleton, tripleton branch lengths)
print(f"Reward matrix shape: {rewards.shape} (n_features={rewards.shape[0]}, n_vertices={rewards.shape[1]})")
print(f"Rewards:\n{rewards}")Reward matrix shape: (3, 6) (n_features=3, n_vertices=6)
Rewards:
[[0 4 2 0 1 0]
[0 0 1 2 0 0]
[0 0 0 0 1 0]]Sample multi-feature observations (each SNP contributes to one feature)
n_obs = 10000
n_features = rewards.shape[0]
observed_data_2d = np.zeros((n_obs * n_features, n_features), dtype=float)
observed_data_2d[:] = np.nan
for i in range(n_features):
observed_data_2d[(i*n_obs):((i+1)*n_obs), i] = graph_1p.sample(n_obs, rewards=rewards[i])
sparse_data = dense_to_sparse(observed_data_2d)mom_multi = graph_1p.method_of_moments(
sparse_data,
rewards=rewards,
)
print(f"True theta: {true_theta_1p}")
print(f"MoM estimate: {mom_multi.theta}")
print(f"Converged: {mom_multi.success}")
print(f"\nSample moments (n_features x nr_moments):\n{mom_multi.sample_moments}")
print(f"\nModel moments (n_features x nr_moments):\n{mom_multi.model_moments}")True theta: [7]
MoM estimate: [6.97868763]
Converged: True
Sample moments (n_features x nr_moments):
[[0.2843898 0.11597319]
[0.15058287 0.07505271]
[0.09552871 0.0272013 ]]
Model moments (n_features x nr_moments):
[[0.28658683 0.11863513]
[0.14329342 0.06844334]
[0.09552894 0.02737734]]Joint probability models
For joint probability graphs created using graph.joint_prob_graph(), observations are feature-count tuples (e.g., [0, 1, 0, 0]) rather than continuous times. The model outputs a probability table, not a PDF/PMF with moments, so standard moment matching does not apply.
The probability_matching() method handles this case by matching the empirical probability distribution to the model probability distribution:
\hat{\theta}_{\text{PM}} = \arg\min_{\theta > 0} \left\| \mathbf{p}_{\text{model}}(\theta) - \hat{\mathbf{p}} \right\|^2
where \hat{\mathbf{p}} are the empirical proportions of each observation pattern. Standard errors are obtained via the delta method with the multinomial covariance:
\text{Cov}(\hat{p}_i, \hat{p}_j) = \frac{\delta_{ij} p_i - p_i p_j}{n}
from functools import partial
from itertools import combinations_with_replacement
all_pairs = partial(combinations_with_replacement, r=2)
# Build the coalescent base graph
nr_samples = 3
indexer = StateIndexer(
lineage=[
Property('descendants', min_value=1, max_value=nr_samples),
]
)
@with_ipv([nr_samples]+[0]*(nr_samples-1))
def coalescent_1param(state):
transitions = []
for i, j in all_pairs(indexer.lineage):
p1 = indexer.lineage.index_to_props(i)
p2 = indexer.lineage.index_to_props(j)
same = int(i == j)
if same and state[i] < 2:
continue
if not same and (state[i] < 1 or state[j] < 1):
continue
new = state.copy()
new[i] -= 1
new[j] -= 1
descendants = p1.descendants + p2.descendants
k = indexer.lineage.props_to_index(descendants=descendants)
new[k] += 1
transitions.append([new, [state[i]*(state[j]-same)/(1+same)]])
return transitions
base_graph = Graph(coalescent_1param)
# Create joint probability graph
mutation_rate = 1.0
joint_graph = base_graph.joint_prob_graph(
indexer, tot_reward_limit=2, mutation_rate=mutation_rate
)
joint_graph.joint_prob_table()| descendants_1 | descendants_2 | descendants_3 | prob | |
|---|---|---|---|---|
| t_vertex_index | ||||
| 4 | 0 | 0 | 0 | 0.166667 |
| 8 | 1 | 0 | 0 | 0.138889 |
| 11 | 0 | 1 | 0 | 0.055556 |
| 13 | 2 | 0 | 0 | 0.043981 |
| 14 | 1 | 1 | 0 | 0.032407 |
| 15 | 0 | 2 | 0 | 0.009259 |
Sample observations from the joint probability table:
true_theta = [7.0, mutation_rate]
joint_graph.update_weights(true_theta)
# Sample from the joint probability table
table = joint_graph.joint_prob_table()
p = table['prob'].to_numpy()
p = p / p.sum()
feature_cols = table.columns[:-1]
np.random.seed(42)
n_obs = 2000
sampled_rows = np.random.choice(len(table), size=n_obs, p=p)
observations = [tuple(int(x) for x in row) for row in table.iloc[sampled_rows][feature_cols].values]
print(f"Sampled {n_obs} observations, first 5: {observations[:5]}")Sampled 2000 observations, first 5: [(0, 0, 0), (2, 0, 0), (1, 0, 0), (0, 0, 0), (0, 0, 0)]Run probability_matching() with the mutation rate fixed:
pm = joint_graph.probability_matching(
observations,
fixed=[(1, mutation_rate)],
)
print(f"True theta: {true_theta}")
print(f"PM estimate: {pm.theta}")
print(f"Std error: {pm.std}")
print(f"Converged: {pm.success}")
print(f"Residual: {pm.residual:.2e}")ProbMatch: theta_dim=2, n_free=1, n_obs=2000, n_unique_obs=6
ProbMatch: initial guess (full theta) = [7.88046282 1. ]
ProbMatch: converged — `gtol` termination condition is satisfied.
ProbMatch: theta = [7.00204262 1. ]
ProbMatch: residual = 3.839769e-05
True theta: [7.0, 1.0]
PM estimate: [7.00204262 1. ]
Std error: [0.3560501 0. ]
Converged: True
Residual: 3.84e-05The ProbMatchResult includes the empirical and model probabilities at the solution allowing posterior predictive check:
import pandas as pd
pd.DataFrame({
'vertex_index': pm.unique_indices,
'empirical_prob': pm.empirical_probs,
'model_prob': pm.model_probs,
})| vertex_index | empirical_prob | model_prob | |
|---|---|---|---|
| 0 | 4 | 0.6935 | 0.694502 |
| 1 | 8 | 0.1590 | 0.163940 |
| 2 | 11 | 0.0785 | 0.077149 |
| 3 | 13 | 0.0310 | 0.029057 |
| 4 | 14 | 0.0295 | 0.026782 |
| 5 | 15 | 0.0085 | 0.008570 |
plt.plot([0, 1], [0, 1], ls='--', c='C1')
plt.scatter(pm.empirical_probs, pm.model_probs)
plt.xscale('log')
plt.yscale('log')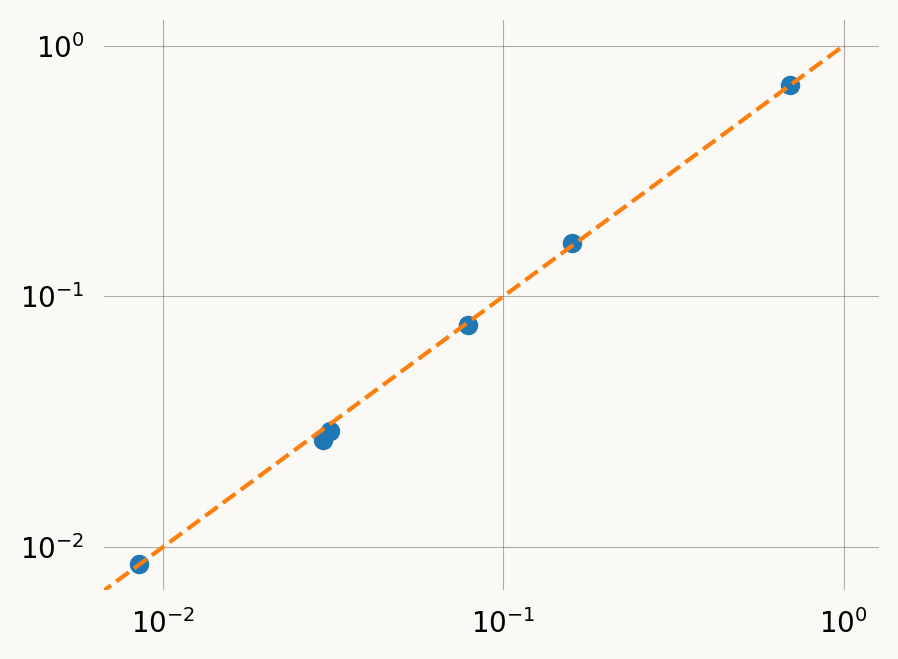
The .prior list can be passed directly to graph.svgd(), just like MoMResult.prior:
svgd_jp = joint_graph.svgd(
observations,
prior=pm.prior,
fixed=[(1, mutation_rate)],
optimizer=Adam(0.25),
)
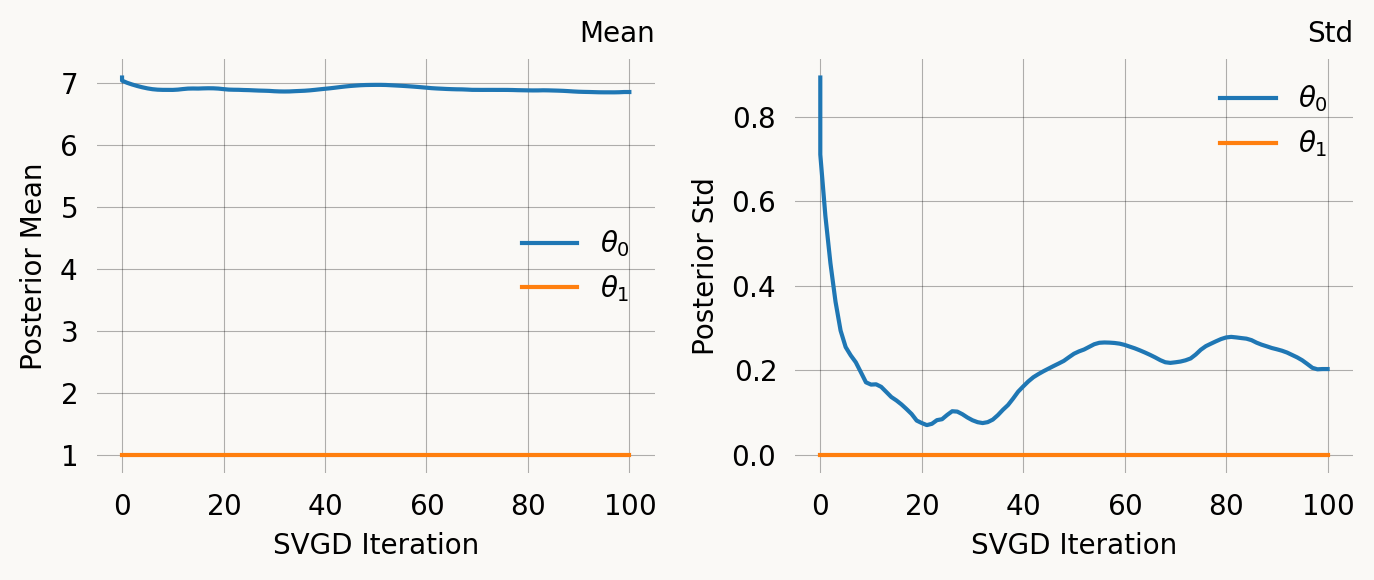
svgd_jp.summary()
svgd_jp.plot_convergence()Parameter Fixed MAP Mean SD HPD 95% lo HPD 95% hi
0 No 6.8969 6.8598 0.2025 6.3339 7.2565
1 Yes 1.0000 NA NA NA NA
Particles: 40, Iterations: 100